Python source code: plot_dyna.py
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from dyna import forced_pendulum
fig = plt.figure()
ax = fig.gca(projection='3d')
omega = 2./3
dt = 2*np.pi / omega / 100
tf = 10000
t, theta, theta_dot = forced_pendulum(1000, dt, np.pi/3, 0,
q=0.5, acc=1.07, omega=omega)
mask = t > 400
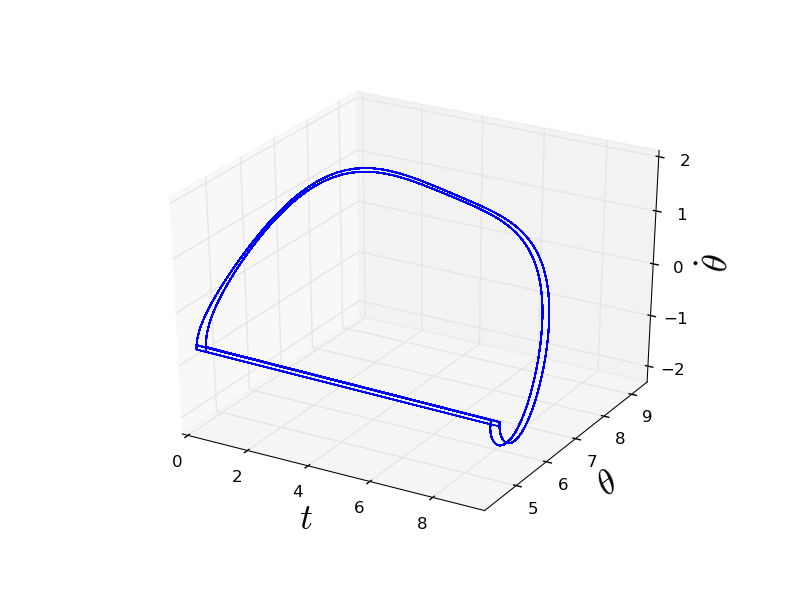
ax.plot(np.mod(t[mask], 2 * np.pi / omega), theta[mask],
theta_dot[mask])
ax.set_xlabel(u'$t$', fontsize=26)
ax.set_ylabel(u'$\\theta$', fontsize=26)
ax.set_zlabel(u'$\dot{\\theta}$', fontsize=26)
plt.show()
Total running time of the example: 0.00 seconds
